圆形阵列
| 相控阵相对于常规的单探头超声检测具有(yǒu)明显的技术优势:
*速度:相控阵探头中被选择的晶片交替激发,使得電(diàn)子扫描(E-扫描)能(néng)够实现高精度、快速的断面扫描(扇形S扫描)以及A扫描、滚动B扫描和L(線(xiàn)性)扫描,甚至能(néng)实现C扫描,能(néng)够非常快速地覆盖构件,要比常规单探头机械系统快得多(duō),在相同时间里提供更好的覆盖。由于能(néng)够一次检测所有(yǒu)被检查部份,大大缩短了检测时间,相对节约成本,减少扫查时间,减轻监测人员的劳动强度,提高了检验精度和可(kě)靠性。
*适应性:设置可(kě)在几分(fēn)钟内改变,能(néng)够适应很(hěn)多(duō)构件的尺寸与几何形状变化,能(néng)够适合于形状复杂构件检验
*检验角度:取决于检测需要和阵列结构,所形成的波束能(néng)够在宽范围内选择波束角度(检验角度),使超声取向*佳化地垂直于预期的缺陷,例如焊缝中的未熔合
*波束控制(通常為(wèi)扇形扫描,S-扫描)能(néng)以适当的和更多(duō)的角度扫描并绘出构件图形达到*佳探测概率。S扫描对于仅有(yǒu)很(hěn)小(xiǎo)扫查位置的情况也是有(yǒu)用(yòng)的从而比常规探头检验更适应扫查接触面积受限的區(qū)域。
*電(diàn)子聚焦可(kě)以使波束形状与尺寸在预期的缺陷位置达到*佳化,获得*大覆盖區(qū)域和*高分(fēn)辨率,以及*佳的探测概率,获得*佳信号和高质量图象。聚焦明显地改善信噪比,而且可(kě)以允许在较低的脉冲電(diàn)压下工作。
*成像:对缺陷检测和图形绘制具有(yǒu)高的分(fēn)辨率,能(néng)够显示缺陷“真实深度”的图像,因而比常规的波形显示更容易解释,能(néng)够通过预先编程的专用(yòng)软件对扫描采集的数据进行分(fēn)析评价,减少检测人员因素的影响。数据可(kě)以保存和按需要重现,甚至可(kě)以视频方式记录和重放。 |
|
| 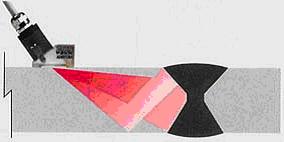
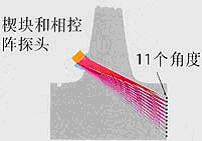
| 用(yòng)一个多(duō)晶片探头进行多(duō)角度检测 | 对复杂的几何形状检测具有(yǒu)很(hěn)强的灵活性 |
|
| 相控阵超声检测系统还具备了编写检测报告、支持USB外部存储媒介以及网络传输等功能(néng)。 |
| 相控阵超声检测系统通常由数据采集单元、脉冲发生单元、電(diàn)机驱动单元、相控阵探头、工业计算机、显示器等组成。系统在Windows 平台上运行专用(yòng)的操作软件,完成对被检工件的扫查、实时显示和结果评判。 |
| 就目前的相控阵技术发展阶段而言,较多(duō)的是采用(yòng)比较简单的二维设置,复杂的三维设置还较少应用(yòng),因為(wèi)目前的相控阵系统已经比常规的单通道系统昂贵得多(duō)。但是,随着更新(xīn)型的便携式仪器的发展,采用(yòng)复杂的三维设置将能(néng)具有(yǒu)更高的速度,更强的数据储存和显示,更小(xiǎo)的扫查接触面积,以及更大的适应性,从而具备更高的应用(yòng)价值。 |
| 在超声检测中,压電(diàn)晶片是用(yòng)于收集数据的。在相控阵应用(yòng)中,相互独立的压電(diàn)晶片被包裹在一个标准探头盒内。其引線(xiàn)卷缆通常由良好屏蔽的微细同轴電(diàn)缆捆扎组成,通过商(shāng)品化的多(duō)通道连接器与仪器连接。 |
| 压電(diàn)元件通常以4到32组发射脉冲,相控阵探头上可(kě)以承受高达200V的发射電(diàn)压。采集与分(fēn)析软件可(kě)根据操作者输入的检验角度、焦距、扫查图形等设置来计算时间延迟。操作者也可(kě)以利用(yòng)预先制备的文(wén)件(见图2)。软件根据单独的“聚焦规则”,依据焦点和扫查组合的时间渡越来计算返回的时间延迟。相控阵仪器的时间延迟電(diàn)路应能(néng)接近2ns精度以提供所需要的相位精度。 |
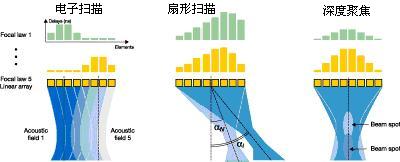
图2
| 在脉冲激发下,每个压電(diàn)元件产生一个波束。这些波束因為(wèi)叠加和相消干涉形成波前。相控阵仪器对各单独通道发射脉冲是具有(yǒu)时间延迟的,从而能(néng)按规定形成一个预先计算的波前。对于接收,仪器则有(yǒu)效地完成逆转。例如,仪器接收的信号具有(yǒu)预先计算的时间延迟,综合时间变化的信号,然后显示出来(见图3)。
综合得到并显示的波形与探伤仪具有(yǒu)同样角度、频率、聚焦孔径等的探头信号通道同样有(yǒu)效。图4為(wèi)聚焦的标准波束和切变波扫查图形示例。 软件 |
|
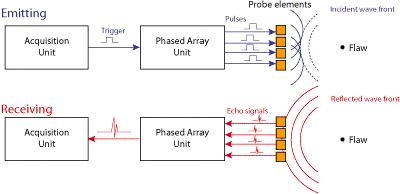
图3相控阵探头的发射与接收
| 相控阵仪器其中的一个非常重要的关键是软件。因為(wèi)相控阵能(néng)提供相当可(kě)观的应用(yòng)适应性,这取决于软件的多(duō)功能(néng)性。应用(yòng)软件要能(néng)够强有(yǒu)力地管理(lǐ)超声检测信号的采集。除了处理(lǐ)计算聚焦规则以外,要求软件具有(yǒu)强大的编码能(néng)力和全数据储存、显示结果,具备良好的数据处理(lǐ)能(néng)力等。
相控阵检验可(kě)以是手动,半自动,或者全自动,取决于应用(yòng),速度,预算等要求。
软件能(néng)够节约用(yòng)户的时间和精力。虽然对于初次设置准备时需要耗费一定的时间,但是信息被记录在文(wén)件中后可(kě)以**次重新(xīn)加载提取,而修改一个已制定的设置是很(hěn)快速的,这与常规探头的调整是截然不同的,这也与目前越来越广泛使用(yòng)的数字化超声探伤仪的使用(yòng)程序是相同的道理(lǐ)。 |
|
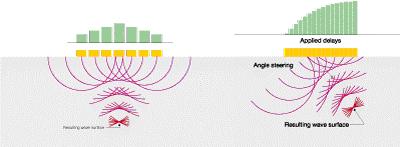
图4扫查图形示例
| 从实际应用(yòng)的观点来看,超声相控阵仅仅是一种发生和接收超声波的方法。一旦超声波进入材料中,它就与发生方法无关,无论是压電(diàn),電(diàn)磁,激光或者相控阵。因此,超声检验的许多(duō)细节是保留不变的。例如,对于常规超声,5MHz是*佳的检验频率,而相控阵也利用(yòng)同样的频率,聚焦孔径尺寸,聚焦長(cháng)度,以及入射角。
和常规超声检测一样,相控阵也是利用(yòng)扫查来采集数据。但是其激发電(diàn)脉冲和超声波的接收则对于扫查图形的变化提供了重要的信息。相控阵的扫描方式: |
|
| 電(diàn)子線(xiàn)性扫描 |
| 電(diàn)子線(xiàn)性扫描(E-扫描)是通过多(duō)路技术以相同的聚焦规则(时间延迟)沿阵列来实现的(见图5)。典型的阵列可(kě)达到128个压電(diàn)元件。E扫描能(néng)够实现用(yòng)一个紧凑的焦点来快速覆盖。如果阵列是平面并且線(xiàn)形的,则扫查图形是简单的B扫描。如果阵列是曲面的,则扫查图形也将是曲面的。E扫描可(kě)以通过简单编程实现。例如,一个相控阵可(kě)以容易地通过编程实现腐蚀绘图,或者利用(yòng)45°和60°横波检查焊缝,模拟常规的ASME手工检验。 |
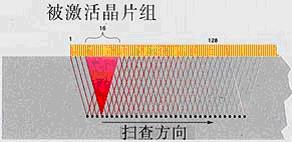
图5动态聚焦示意图(可(kě)实现无机械运动的高速扫查)
| 常规手工超声焊缝检验是利用(yòng)一个单探头实施的,操作者进行前后“扫描”以覆盖焊接區(qū)域。许多(duō)自动化焊接检验系统也是利用(yòng)类似的方式(见图6a),使用(yòng)一个单探头前后扫查覆盖焊接區(qū)域。这是很(hěn)消耗时间的,而且在扫查开始和结束时系统还有(yǒu)盲區(qū)。
作為(wèi)对照,相控阵利用(yòng)線(xiàn)性扫描方式(见图6b)。通常使用(yòng)两个阵列探头分(fēn)布于焊缝两侧。它能(néng)产生上千种不同的超声束,可(kě)配置40°到70°范围的扫查角度(β角),以满足分(fēn)區(qū)扫查所需要的各种角度。这里探头是線(xiàn)性地在焊缝周围或者沿焊缝扫查,每个探头扫过焊缝的整个规定區(qū)域。它常常可(kě)以利用(yòng)相控阵实现更多(duō)的波束(相当于单独的常规探头)同时扫描。線(xiàn)性扫描是*简单的方式,例如用(yòng)于轧管、ERW焊接管的检验。 |
|
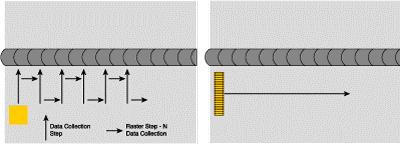
图6a和图6b
| 扇形扫描 扇形扫描(S-扫描)是相控阵所独有(yǒu)的。它利用(yòng)同组压電(diàn)元件但是由编程改变时间延迟来控制波束通过一系列角度来实现扫查。
S扫描的典型应用(yòng)例如一个固定阵列,扫查横过一个相对达不到的构件,如涡轮转子叶片,并绘出叶片的形貌与缺陷(见图7)。S扫描也可(kě)以用(yòng)于检验焊缝,但是有(yǒu)一定局限,主要取决于阵列的频率和压電(diàn)元件的间距,扇形扫描的角度可(kě)以从±20°到±80°变化。 |
|

图7涡轮转子叶片的扇形扫描
| 组合扫描 组合扫描是结合了線(xiàn)性扫描、扇形扫描和**聚焦而得到的实用(yòng)的综合显示(见图8)。对于焊缝和其他(tā)构件可(kě)以选择*适宜的角度,在電(diàn)子扫描中可(kě)以快速有(yǒu)效地检验。例如,结合線(xiàn)性与纵波的扇形扫描可(kě)以在一个给定的角度范围内使超 |
|
| 声束完全覆盖被检验的构件,例如±20°。当使用(yòng)简单的直波束不能(néng)充分(fēn)检验到所有(yǒu)需要检查的區(qū)域时,这种组合扫描的检验就體(tǐ)现出优势了。在焊缝检验中,对于给定的焊缝几何形状常常要求规定的角度。对于这些应用(yòng),可(kě)通过针对特定的焊缝倾斜角编程来实现在规定的位置上达到**的波束角度。 |

图8组合扫描显示
| 
| | 以管道环焊缝的检测為(wèi)例,采用(yòng)區(qū)域划分(fēn)法,根据壁厚、坡口形式、填充次数将焊缝分(fēn)成垂直方向上的几个區(qū),每个分(fēn)區(qū)高度一般為(wèi)1~3mm,再由電(diàn)子系统控制相控阵探头对其进行分(fēn)區(qū)扫查(每个區(qū)都由一组独立的晶片进行扫查),检测主声束的角度按照主要缺陷的方向来设定(例如在自动焊中主要是未熔合,即将波束尽量垂直于熔合線(xiàn)),通常采用(yòng)聚焦声束进行扫查,焦点尺寸一般為(wèi)2mm或更小(xiǎo)。它们可(kě)以有(yǒu)效的检测各自的區(qū)域,而且临近區(qū)域反射體(tǐ)上的重叠*小(xiǎo)。每个分(fēn)區(qū)以焊缝中心線(xiàn)為(wèi)界,分(fēn)為(wèi)上游、下游两个通道,其检测结果在带状图上以相对应的通道显示出。再辅以TOFD(衍射时差法)和B扫描功能(néng),对焊缝进行分(fēn)析、判断。 |
|